
弊社のモーションコントローラは、直線補間・円弧補間に対応しています。
1.直線補間
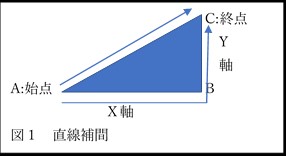
図1の三角形の始点から終点へ位置決め制御(モーションコントロール)を行う場合
①通常のPTPで行う場合X軸移動(A:始点からB)後、Y軸移動(B点からC:終点)となります。
②直線補間で行うと、図1の場合 X軸(長軸) Y軸(短軸)となります。
補間比:Z = Y軸(短軸)移動量÷X軸(長軸)移動量
X軸(長軸)は通常のPTP動作を行いY軸(短軸)はX軸(長軸)に補間比:Zで同期した動作を
行い図1のA:始点からC:終点(B点を経由しない)への移動を行います。
2.円弧補間
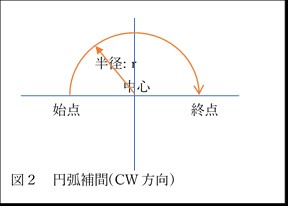
図2の様に始点から終点への位置決め制御を行う時に円弧の軌跡を描くように移動を行います。
始点から終点の指定を行う時に以下の何れかの方法が有ります。
・図2の様に始点座標・中心位置座標と半径:rと終点座標を指定して円弧を描きます。
・終点座標を始点座標と同じ位置を指定すれば円を描きます。
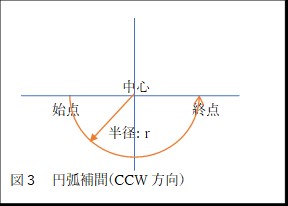
・図2ではCW(時計方向)ですが、図3の様にCCW(反時計方向)も任意で指定する事が出来ます。
・円弧補間の設定パラメータとして始点座標・終点座標・中心座標・半径を指定する方法を述べましたが、
始点座標・通過点座標・終点座標の3点を指定する方法も有ります。
東阪電子の技術情報
弊社ではモーションコントロール(PTP・直線補間・円弧補間)を応用した製品としてはんこ自販機があります。
はんこ自販機ではんこ印材への印影の加工(切削)を行う際に今回説明しました直線補間や円弧補間の技術を
使って実現しています。同様の開発・設計・製造の実績は豊富にありますのでお気軽にお問合せ下さい。