
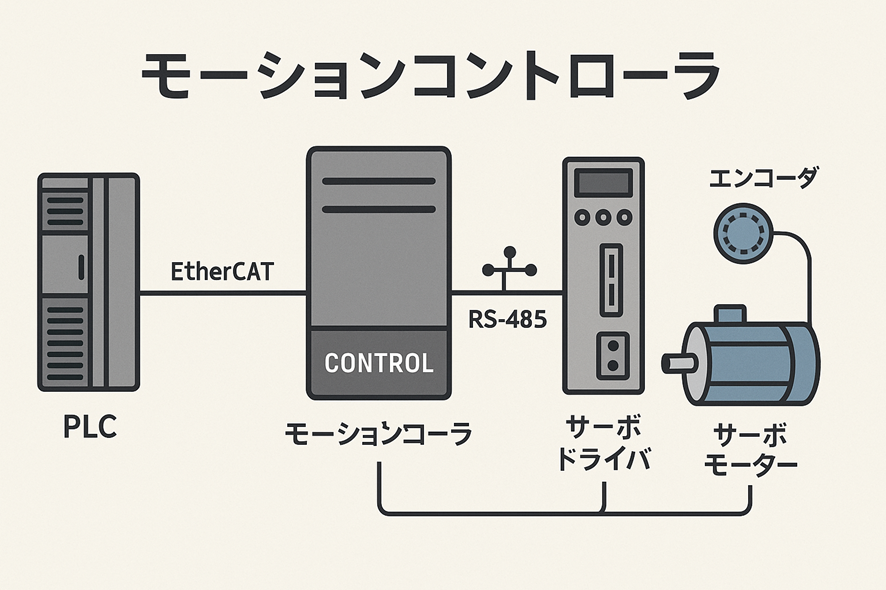
モーションコントローラは機械やロボットの精密は動作を制御するために使用される装置です。主に産業用オートメーションやCNC(コンピュータ数値制御)機械・ロボット工学などの分野で利用されます。モーションコントローラは位置・速度・加速度をリアルタイムで制御するきのうを持っています。
1.モーションコントローラの主な機能
モーションコントローラの主な機能は精密な位置や速度の制御・リアルタイムなフィードバック制御などの複雑な機械やロボットの動きを高精度で管理ができる事です。このような機能によって工業用機械やロボット・CNC工作機械・3Dプリンターなどでの精密な動作が可能となります。
1-1 位置制御(Position Control)
位置制御はモーションコントローラの基本的な機能の一つで、装置や機械の正確な位置を制御する役目を果たします。ロボットのアームや機械部品が特定の位置に正確に移動する事が必要な場合この制御を用います。
- 主な用途:ロボットの手先の位置決め・CNC工作機器の刃物位置・組み立てラインの機械部品の配置など。
- 主な技術:エンコーダやセンサーで現在位置をフィードバックし、設定された目標位置と比較して動作を調整します。
1-2 速度制御(Velocity Control)
速度制御はモータやアクチュエータの速度を一定に保つ機能です。ベルトコンベヤーの速度を一定に保つ場合や、ロボットの動作をスムーズに行う場合に使用されます。
- 主な用途:産業用機器のベルコベア・工作機械の切断速度・ロボットの動作速度などの制御。
- 主な技術:センサーを使用して現在の速度を監視し、必要に応じて制御信号を調整して設定速度を維持します。
1-3 加速度制御(Acceleration Control)
加速度制御は動作開始や停止時に加速度を管理し動きがスムーズで衝撃を最小限に抑えるようにします。急激な動作やブレーキを避けることで機械や部品の寿命を延ばすことになります。
- 主な用途:産業用ロボットのアーム操作・CNC機械のツール移動・搬送システムなど。
- 主な技術:加速度の制御は事前に設定された加速・減速プロファイルに基づいて滑らかな動作を実現しています。
1-4 軌道制御(Trajectory Control)
軌道制御は機械やロボットが移動する際の経路(起動)を計画(プログラミング)を行いその内容通りに動作させる機能です。直線や円弧など複雑な動作経路を計画(プログラミング)してスムーズな移動を実現します。
・主な用途:ロボットアームが製品を移動させるときやCNC機械が材料を加工する際のツールパス。
(*)ツールパス:CNC機械などで製品を加工する際にツールが通過する経路をコード化したもの。
- 主な技術:プログラムによって設定された起動を基に、複数のモータの同期運転を行い軌道通りに移動を行います。
多軸制御は複数のモータやアクチュエータを同時に制御し複数の動作軸を同期させる機能です。産業用ロボットや複雑な機械では複数の動作軸が連動して動く必要がありこの制御が重要となります。
- 主な用途:ロボットアームの複数の関節・CNC工作機械のX軸・Y軸・Z軸・(Θ軸)の同時制御。
- 主な技術:各軸の動きを正確に同期させ特定の動作を行うためにリアルタイムで制御を行います。
1-5 多軸制御(Multi-Axis Control)
多軸制御は複数のモータやアクチュエータを同時に制御し複数の動作軸を同期させる機能です。産業用ロボットや複雑な機械では複数の動作軸が連動して動く必要がありこの制御が重要となります。
主な用途:ロボットアームの複数の関節・CNC工作機械のX軸・Y軸・Z軸・(Θ軸)の同時制御。
主な技術:各軸の動きを正確に同期させ特定の動作を行うためにリアルタイムで制御を行います。
1-6 フィードバック制御(Feedback Control)
フィードバック制御はセンサーやエンコーダなどからデータを基に現在の動作状況を確認し・誤差を修正し・正確な動作を維持する機能です。クローズドループシステムで良く使用されています。
- 主な用途:ロボットの位置や速度の補正CNC工作機械の正確な加工精度の維持。
- 主な技術:モーションコントローラはセンサーからのデータをリアルタイムで受け取りプログラムされた目標と比較して動作を制御します。誤差が発生した場合は自動的に修正を行います。
1-7 同期制御(Synchronization)
複数の機械やモータが同時に動作させる場合はそれらの動作を同期させる機能です。例えば複数のベルトコンベアやロボットアームが同期して作業を行う際にはこの機能が重要となります。
- 主な用途:組立ライン・搬送システム・ロボットの協調作業。
- 主な技術:複数のモータやアクチュエータが同期して動作するように、正確に時間(タイミング)と位置を制御します。
1-8 機能に関してご参考までに
①制御モードの切り替え(Switching Control Modes)
モーションコントローラはさまざまな制御モードを使い分けることが可能で動作の特性に応じて適切な制御方式を選択します。
- 位置制御モード: 正確な位置決めに使用されます。
- 速度制御モード: モータの速度を一定に保つために使用されます。
- トルク制御モード: 機械やロボットにかかる力を制御し特定のトルクを維持するために使用されます。
②安全機能(Safety Features)
モーションコントロールには安全機能も組み込まれており、異常が発生した際にシステムを停止させ危険な動作を避けるための制御が行われます。
- 主な用途:機械やロボットの故障時の緊急停止・衝突回避。
- 主な技術:モーションコントローラは異常を検出すると、動作の停止や適切な処理を行います。

2.使用例について
モーションコントローラは精密な動作や動きの制御が必要なさまざまな分野で活躍しています。代表的な例で説明いたします。
2-1 産業用ロボット(Industrial Robotics)
産業用ロボットではモーションコントローラを使って多軸の動きを制御して、溶接・組み立て・搬送などのタスクを自動化します。ロボットは複数の関節やアームを持っているためモーションコントローラが位置と速度を同時に制御しながら複雑な作業を正確に実行します。
2-2 CNC工作機械
CNC(Computer Numerical Control)工作機械は金属や木材・プラスティックなどの材料を切断・加工を行うために使用されます。モーションコントローラはツール(切削刃:ドリルなど)をX・Y・Z軸に製作に移動を行い設計通りに材料の加工を行います。
金属部品の精密加工(CNC工作機械)ではモーションコントローラがツールの位置を製作に制御を行い複雑な形状を高精度で加工を行っています。
手作業では難しい高精度な加工が可能で同じ作業を繰り返し何度も行う事ができ生産性が向上するメリットがあります。
2-3 3Dプリンター
3Dプリンターはモーションコントローラによってプリンタヘッドを製作に移動させ材料を積層して立体物を作り上げます。特に多軸制御が重要で材料の供給速度材料の供給速度や積層位置を高精度で管理しています。
プロトタイプの製作やカスタムパーツの製造が従来の加工方法より容易に高精度のものが素早く実現できるメリットがあります。
2-4 医療機器
医療分野では精密な動作が必要な機器にモーションコントローラが利用されています。特に手術ロボットや画像診断装置では微細な動きや正確な位置決め重要となります。
ロボット手術システムで医師が遠隔操作するロボットアームが製作な位置で手技が行えるのもモーションコントローラがアームの微細な動きをリアルタイムで制御を行っているからです。
2-5 半導体製造装置
半導体製造はナノレベルの精度が要求される非常に複雑なプロセスです。モーションコントローラはウエハの位置決めやプロブステーションでの測定など精密な動作が必要な工程で需要な役割を果たしています。 ウエハの表面に回路を形成するためのリソグラフィ装置はモーションコントローラがウエハの位置を正確に制御し、回路パターン作成を行うことで微細な構造を正確に形成できるために高性能な半導体チップを製造することが出来ることが大きなメリットとなります。
2-6 梱包機械
梱包機械では製品を一定の速度で運びパッケージに入れる作業が正確かつ敏速に行われます。モーションコントローラはコンベアの速度調整や梱包素材の供給タイミングを正確に行う(制御)することで効率的で正確な自動こんぽうを実現しています。
食品や医薬品の自動梱包機として活用されています、製品の流れる速度と梱包のタイミングの同期を行うことでスムーズな自動化を実現しています。
2-7 自動車
自動車の製造プロセスに限らず、車両自体の操作にもモーションコントローラが使用されています。特に自動運転技術やアクティブサスペンションシステムなどでは、モーションコントローラが車両の動きをリアルタイムで制御を行います。
- 使用例:自動運転車のステアリング制御。モーションコントローラがステアリングと車両の動きの調整をおこなって車両を正確に制御します。
- メリット:高度な運転操作が可能となり、自動運転技術の実現に貢献しています。
2-8 印刷機械
大型の印刷機械では、紙を正確な速度で送りながら同時に印刷が行われますのでモーションコントローラが紙送り速度と印刷ヘッドの正確に位置制御を制御行って連続した印刷を行います。
- 使用例:オフセット印刷機やデジタル印刷機、モーションコントローラが紙の送り速度と印刷ヘッドの位置を正確に制御し連続した印刷を行います。
- メリット:高速かつ正確な印刷が可能となり大量生産の対応が可能となります。
まとめ
モーションコントローラは産業用機械やロボット・医療機器・半導体製造・自動車・自動梱包機など、精密な動作制御が必要な分野では幅広く用いられています。作業の効率化と精度向上・安全性の向上が実現し技術的進歩に大きく貢献しています。