
モータードライバーのドライブ回路でモーター電流の接続状態を変更するのに用いる回路です。
1.概要
Hブリッジ回路は、モーターなどの負荷を制御するために使用される電子回路の一種です。Hブリッジ回路は、四つのスイッチ(トランジスタやMOSFETなど)を組み合わせて構成され、負荷(例:モーター)への電源供給を逆転させたり、停止させたりすることができる回路です。Hブリッジ回路は、モーターを正転・逆転させる制御や、モーターを停止させる制御など、様々なアプリケーションで利用されます。
2、Hブリッヂ回路の基本
モーターを単に一方向でON―OFFするだけなら1個のスイッチ(トランジスタなど)で可能ですが、回転方向を変化(正転や逆転)させるにはこのHブリッジが必要となります。
Hブリッジ回路の動作原理を簡単に説明しますと以下の通りになります。
Hブリッジ回路は、モーターを効率的に制御するための一般的な手法であり、ロボット、自動車、ドローン、家電製品など、さまざまなアプリケーションで使用されています。
①停止:
上下のスイッチすべてを同時にオフにすることで、電流の流れが遮断され、モーターは停止(回転しません)します。
②正転:
上側左のスイッチ(SW1)と下側右のスイッチ(SW4)をオンし、上側のスイッチ(SW3)と下側のスイッチ(SW2)をオフにします。この状態で電流が負荷を流れることで、モーターは正転します。
③逆転:
上側左のスイッチ(SW3)と下側右のスイッチ(SW2)をオンし、上側のスイッチ(SW1)と下側のスイッチ(SW4)をオフにします。この状態で電流が負荷を流れることで、モーターは正転します。
④電気子端子同士の接続:
SW1、SW3をOFF、SW2、SW4をONすると端子同士が接続状態になります。①の停止と同様に回転しませんが、モーターが回転中にこの状態にするとブレーキ状態になります。
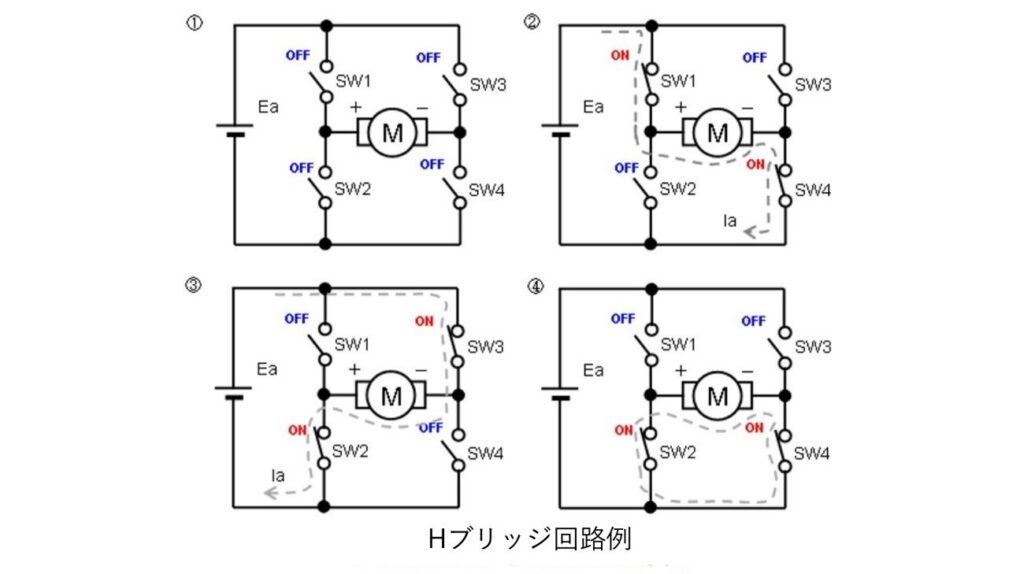
図1
3.実際のHブリッジ回路
上図は接続の組み合わせをわかりやすく説明するためにスイッチで説明を行いましたが、実際の電子回路では4つのスイッチは半導体のパワートランジスタやMOSFETを使います。
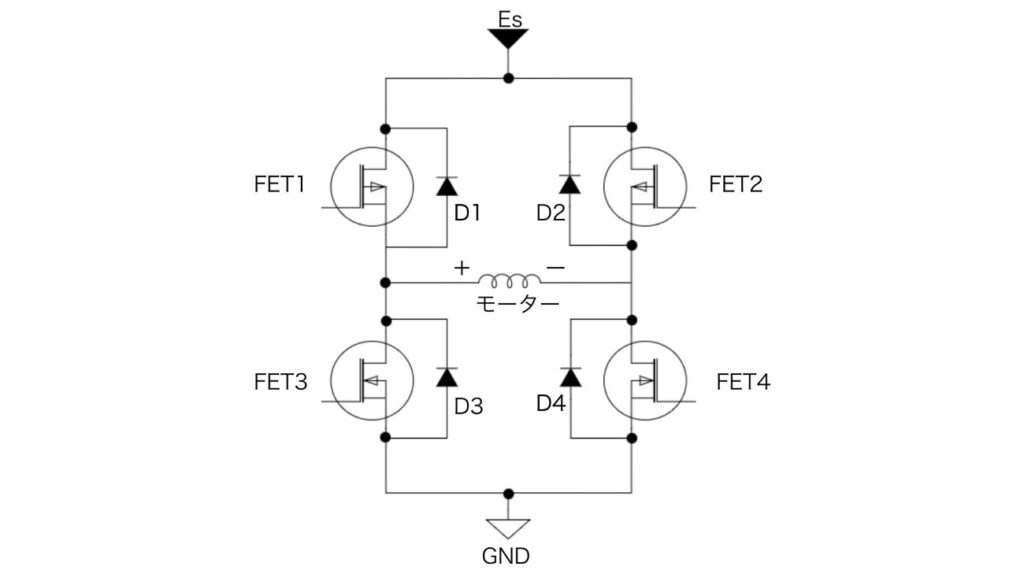
図2 実際のHブリッジ
このような感じの回路になります(あくまでも簡易に書いています)。
(*)パワートランジスタ(MOSFET):使用するモーターに供給するパワー
・モーターに流れる電流
・モーターに印加する電圧(Es)
に応じて選定します。
3-1 2相ステッピング(バイポーラ)場合
ⅮCモーターの場合なら、図の様な基本回路で構成されますが、2相ステッピングモータ(バイポーラ接続)の場合ではそれぞれの相(巻き線)毎に同様な回路構成が必要になります。すなわち同様の回路を2組必要になります。
ご存じの方もおられるかもしれませんが、2相ステッピングにはユニポーラ接続もあります。これは少し違う回路になります詳しくはまたの機会にします。
3-2 実際の駆動回構成
モーターの回転方向(モーターに流れる電流の方向)を制御(変更)するだけあれば今までの説明で可能ですが、実際にモーターを使用(制御)するにはモーターの回転速度も制御(変化)したいですね。ⅮCモーターの回転数を制御(変化)するには電圧(Es)を制御(変化)することになります。
ⅮCモーターの回転数を低速から高速に変化させるのであれば、印加する電圧(Es)を低い電圧から高い電圧に変化させる必要があります。この電圧制御を行う制御回路が必要になります。
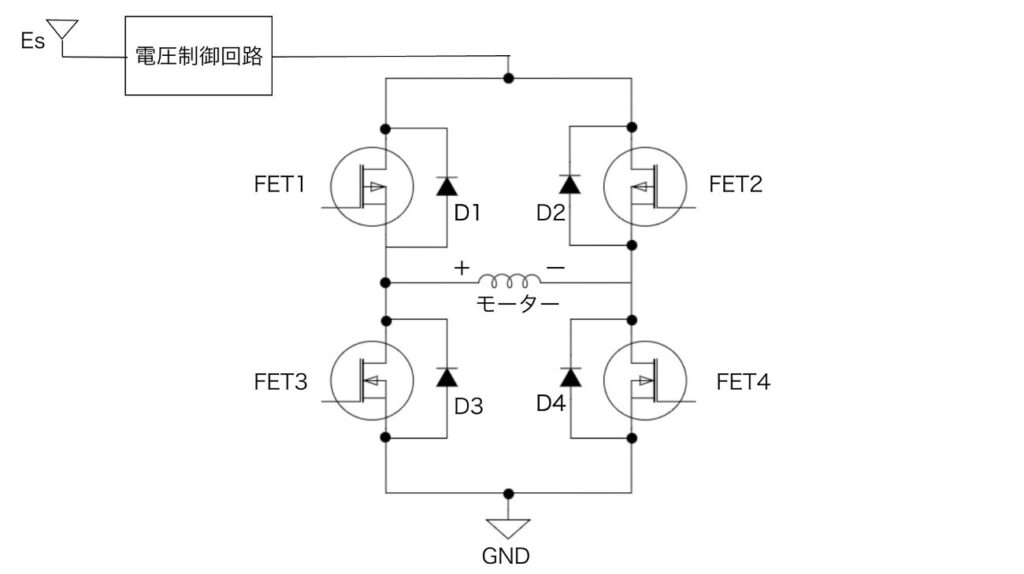
図3 電圧制御回路
この様な感じです。
3-3 モーター回転時の制御①
・一例としてモーターを正転方向に回転させる様子について少し説明致します。
FET1とFET4をオンすると図1の②の経路で電流が流れモーターが回転します。ここでは、図1の方向に電流が流れたときにモーターが回転する方向を「正転」方向としています。
(*)正転・逆転:正転・逆転の定義の仕方によっては反対になる事があるので注意が必要です。弊社では、モーターのフランジ面からモーター軸を見て時計方向の回転を正転(CW)、反時計方向の回転を逆転(CCW)と読んでいます。この逆を正転・逆転と呼ぶこともあるそうです。
停止しているモーターが加速して、一定速回転に至るまでにモーターに流れる電流の様子は次の様(図)になります。
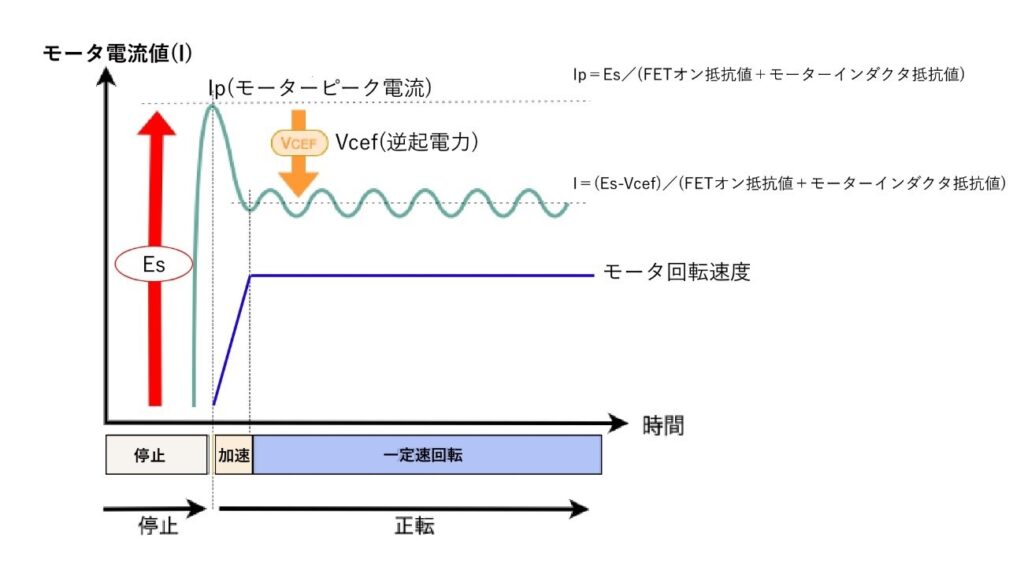
図4 モーター電流の様子
電圧を印加し電流が流れ始めてモーターが回転し始めモーターの回転数が一定回転になるまでの様子が上図になります。この時モーターが回転するまでの間に流れる電流 Ip(モーターピーク電流) は、オームの法則から次の様になります。
Ip = Es/(Ron_fet1 + Ron_fet4 + RL)
FETのオン抵抗:Ron_fet や、インダクターの直列抵抗成分:RLの抵抗値は非常に小さいので、Ip(ピーク)は大きな値となります。これを“突入電流”、“起動時電流”、“停動電流”等といいます。
次に、モーターが回転し始める(加速していく)と、フレミングの右手の法則(磁場で導体を動かすと起電力が発生して電流が流れる)により、電源電圧Esとは逆向きに逆起電力Vcefが発生し、モーターの回転数に比例して大きくなります。
回転数がある程度まで上がると、電源電圧Esと逆起電力Vcefは拮抗し、安定(定速回転)します。
3-4 モーター回転時の制御②
先ほどの述べました様にモーターの起動時には大きな電流(突入電流)が流れます。実際の回路ではこの電流を制御せずに使用すると。
・モーター定格を超える電流が流れる。
・FET1~FET4の最大定格を超える電流が流れる。
等実際の回路では色々な弊害が発生し、最悪モーターの破損やHブリッジ回路が破損する恐れがあります。
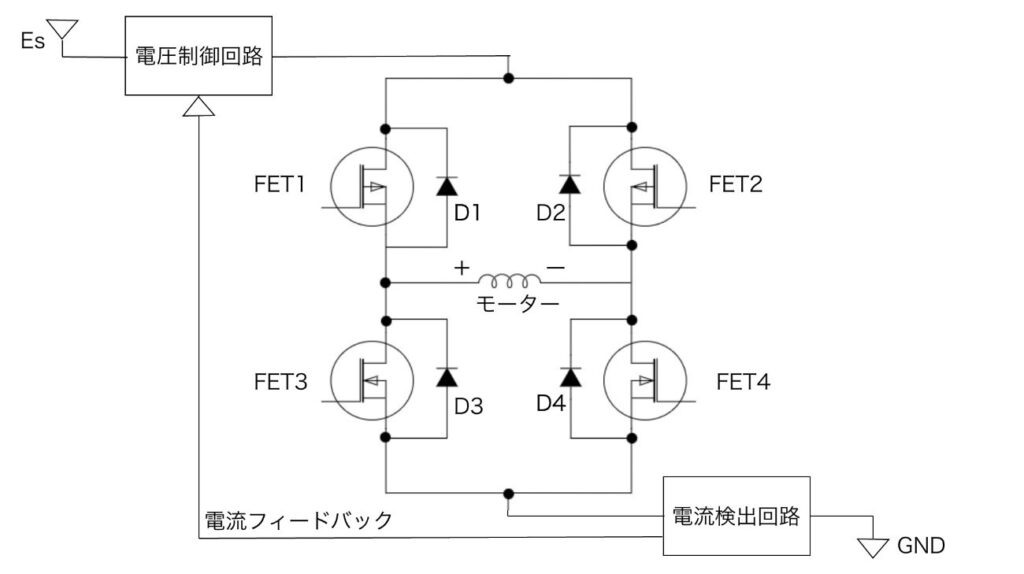
図5 電流検出回路を追加
そこで、通常ではモーターに流れる電流を「電流検出回路」で検出しその情報を「電圧制御回路」にフィードバックしてモーターに流れる電流を適切な制御を行っています。
(*)尚この回路は説明用に簡易に表現していますので、実際の回路(ブロック)とは違いますのでご注意下さい。
3-5 モーターの停止
モーターの【正転】状態から【停止】状態にした時のHブリッジの状態を簡単に説明致します。(下図を参照下さい。)
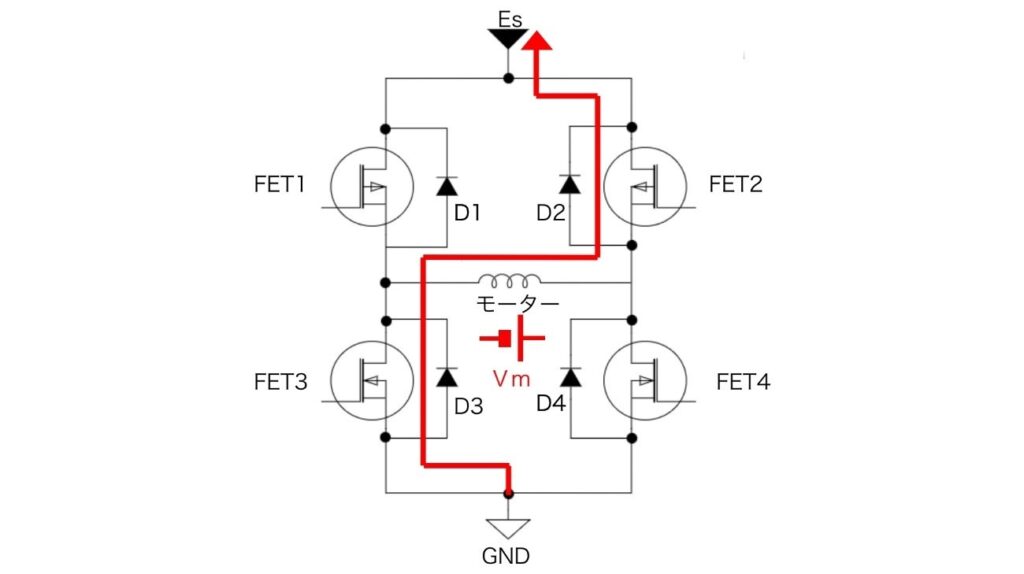
図6 モーターOFFの様子
全てのFETをOFF(オフ)状態しますと回転中のモーターは「停止」状態になり、モーターはゆっくりと停止します。
この時モーターは、モーターの構成要素でありますインダクター(コイル)には、自分自身に流れる電流の変化を妨げる(嫌う)性質があります。電源Esからの電源供給が無くなった後も、それまで流れていた電流を流し続けようとします(電源Vmが発生したかの様に振る舞います)。
すなわち、FETは全てOFFですがモーターのVmによってFETのボディダイオード(この場合はD2とD3)に電流が流れ(上図の赤線の経路)ます。
VmがEsより大きい(電圧が高い)時はブレーキ状態となりモーターは減速します。
(*)FETのボディダイオード:FET1~FET4の図ではD1~D4とFETとは独立した部品の様に書いていますが実際はFETの構成上図の様にFETのソース・ドレイン間にダイオードが構成され、そのために「ボディダイオード」とか「寄生ダイオード」等という表現をしています。
しかし、実際はモーターが発生するVmが供給電源電圧Esに対して大きすぎる(電圧が高すぎる状態)状態では電源回路に異常を来す事がありますので何らかの保護回路などで制限を行っています。
余談な話ですが、電車のブレーキはこの現象を利用しています。減速する時はモーターが発生するVmを架線に送って他の電車の電力に使っています。モーター回転が落ちて(電車の速度が落ちる)ブレーキの効果が無くなると空気ブレーキで電車をホームの指定位置にピッタと停止させています。