特徴
□業界最小クラスの大きさ
特徴
・当社従来製品(ePI-01)対比で面積比約75%減 大幅な小型化を実現
提案価値
・従来は搭載出来なかった卓上ディスペンサやロボット等小型装置に搭載が可能となり装置の小型化に貢献が可能です
□複雑な制御を安価に対応
特徴
・多彩な補間機能を搭載(4軸直線補間、ビットパターン補間、CW/CCW円弧補間、ヘリカル補間)
・ディスペンサに有効な無制限連続補間機能実装
・8台スタッキング接続(嵌合)することで最大32軸を制御
提案価値
・「Raspberry Pi+ePI-09」のみの構成で、ロボット制御や同期制御等複雑な動作も可能です
・従来のPLCやIPCと比較して安価にシステムを構築する事が出来、コスト削減が可能です
□容易にプログラム対応が可能
特徴
・C言語、C++に対応したAPIを用意しており、プログラム対応が容易
・多くのユーザーが使用しているRaspberry Piに対応
提案価値
・Raspberry Piに対応し、且つAPIを用意している為、0から設計をする必要がなくプログラムの修正も容易に行うことが可能です
紹介動画
仕様
|
項目 |
仕様 |
|||
|
製 品 名 |
Raspberry Pi I/F対応 4軸モーション・コントローラ |
|||
|
製品型式 |
ePI-09 |
|||
|
制御部 |
出力回路 |
差動ラインドライバ |
||
|
出力速度範囲 |
1~8MHz |
|||
|
加速度範囲 |
1Hz/sec~536,870,911Hz/sec |
|||
|
出力パルス範囲 |
-2,147,483,646~+2,147,483,646 drive pulse |
|||
|
加減速度カーブ |
定速、対称/非対称直線加減速、対称/非対称S字加減速 |
|||
|
エンコーダA相/B相入力 |
高速フォトカプラ入力 |
|||
|
主な制御機能 |
定量位置決め、連続送り、原点復帰、補間(直線、円弧) |
|||
|
汎用入力仕様 |
フォトカプラ絶縁 1点/軸 |
|||
|
汎用出力仕様 |
フォトカプラ絶縁オープンコレクタ出力 4点/軸 |
|||
|
I/F |
通信 |
I2C(対Raspberry Pi) |
||
|
一般 |
電源電圧 |
DC24V±10% |
||
|
使用温度範囲 |
0~+45℃ |
|||
|
外形寸法 |
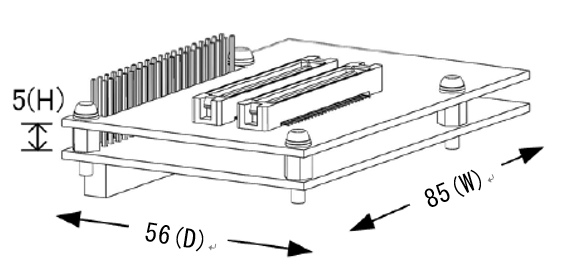
W85×D56mm(コネクタ、金具部は含まず) |
|||
|
規格 |
RoHS指令に適合 |
|||
外形
設定
■ボード番号 SW1(1・2・3番)
| ボード番号 | 1 | 2 | 3 |
| 0 | ON | ON | ON |
| 1 | ON | ON | OFF |
| 2 | ON | OFF | ON |
| 3 | ON | OFF | OFF |
| 4 | OFF | ON | ON |
| 5 | OFF | ON | OFF |
| 6 | OFF | OFF | ON |
| 7 | OFF | OFF | OFF |
コネクタ電子仕様
ドライバ接続 CN6
| PIN番号 | 信号名 |
|---|---|
| 1 | 外部電源(DC24V) |
| 2 | 緊急停止(1~4軸共通) |
| 3 | X軸+方向リミット |
| 4 | X軸-方向リミット |
| 5 | X軸汎用入力 |
| 6 | X軸汎用入力 |
| 7 | X軸汎用入力 |
| 8 | Y軸+方向リミット |
| 9 | Y軸-方向リミット |
| 10 | Y軸汎用入力 |
| 11 | Y軸汎用入力 |
| 12 | Y軸汎用入力 |
| 13 | X軸サーボ位置決め完了 |
| 14 | X軸サーボアラーム |
| 15 | X軸エンコーダA相 |
| 16 | X軸エンコーダA相 |
| 17 | X軸エンコーダB相 |
| 18 | X軸エンコーダB相 |
| 19 | X軸エンコーダZ相 |
| 20 | X軸エンコーダZ相 |
| 21 | Y軸サーボ位置決め完了 |
| 22 | Y軸サーボアラーム |
| 23 | Y軸エンコーダA相 |
| 24 | Y軸エンコーダA相 |
| 25 | Y軸エンコーダB相 |
| 26 | Y軸エンコーダB相 |
| 27 | Y軸エンコーダZ相 |
| 28 | Y軸エンコーダZ相 |
| 29 | X軸+方向ドライブ操作 |
| 30 | X軸+方向ドライブ操作 |
| 31 | Y軸-方向ドライブ操作 |
| 32 | Y軸-方向ドライブ操作 |
| 33 | 内部回路GND |
| 34 | X軸汎用出力 |
| 35 | X軸汎用出力 |
| 36 | X軸汎用出力 |
| 37 | X軸汎用出力 |
| 38 | X軸+方向ドライブパルス |
| 39 | X軸+方向ドライブパルス |
| 40 | X軸-方向ドライブパルス |
| 41 | X軸-方向ドライブパルス |
| 42 | 内部回路GND |
| 43 | Y軸汎用出力 |
| 44 | Y軸汎用出力 |
| 45 | Y軸汎用出力 |
| 46 | Y軸汎用出力 |
| 47 | Y軸+方向ドライブパルス |
| 48 | Y軸+方向ドライブパルス |
| 49 | Y軸-方向ドライブパルス |
| 50 | Y軸-方向ドライブパルス |
ドライバ接続 CN7
| PIN番号 | 信号名 |
|---|---|
| 1 | 外部電源(DC24V) |
| 2 | 外部電源GND |
| 3 | Z軸+方向リミット |
| 4 | Z軸-方向リミット |
| 5 | Z軸汎用入力 |
| 6 | Z軸汎用入力 |
| 7 | Z軸汎用入力 |
| 8 | U軸+方向リミット |
| 9 | U軸-方向リミット |
| 10 | U軸汎用入力 |
| 11 | U軸汎用入力 |
| 12 | U軸汎用入力 |
| 13 | Z軸サーボ位置決め完了 |
| 14 | Z軸サーボアラーム |
| 15 | U軸エンコーダA相 |
| 16 | U軸エンコーダA相 |
| 17 | U軸エンコーダB相 |
| 18 | U軸エンコーダB相 |
| 19 | U軸エンコーダZ相 |
| 20 | U軸エンコーダZ相 |
| 21 | U軸サーボ位置決め完了 |
| 22 | U軸サーボアラーム |
| 23 | Z軸エンコーダA相 |
| 24 | Z軸エンコーダA相 |
| 25 | Z軸エンコーダB相 |
| 26 | Z軸エンコーダB相 |
| 27 | Z軸エンコーダZ相 |
| 28 | Z軸エンコーダZ相 |
| 29 | Z軸+方向ドライブ操作 |
| 30 | Z軸+方向ドライブ操作 |
| 31 | U軸-方向ドライブ操作 |
| 32 | U軸-方向ドライブ操作 |
| 33 | 内部回路GND |
| 34 | Z軸汎用出力 |
| 35 | Z軸汎用出力 |
| 36 | Z軸汎用出力 |
| 37 | Z軸汎用出力 |
| 38 | Z軸+方向ドライブパルス |
| 39 | Z軸+方向ドライブパルス |
| 40 | Z軸-方向ドライブパルス |
| 41 | Z軸-方向ドライブパルス |
| 42 | 内部回路GND |
| 43 | U軸汎用出力 |
| 44 | U軸汎用出力 |
| 45 | U軸汎用出力 |
| 46 | U軸汎用出力 |
| 47 | U軸+方向ドライブパルス |
| 48 | U軸+方向ドライブパルス |
| 49 | U軸-方向ドライブパルス |
| 50 | U軸-方向ドライブパルス |
1.モーションコントローラの主な機能
モーションコントローラの主な機能は精密な位置や速度の制御・リアルタイムなフィードバック制御などの複雑な機械やロボットの動きを高精度で管理ができる事です。このような機能によって工業用機械やロボット・CNC工作機械・3Dプリンターなどでの精密な動作が可能となります。
1-1 位置制御(Position Control)
位置制御はモーションコントローラの基本的な機能の一つで、装置や機械の正確な位置を制御する役目を果たします。ロボットのアームや機械部品が特定の位置に正確に移動する事が必要な場合この制御を用います。
- 主な用途:ロボットの手先の位置決め・CNC工作機器の刃物位置・組み立てラインの機械部品の配置など。
- 主な技術:エンコーダやセンサーで現在位置をフィードバックし、設定された目標位置と比較して動作を調整します。
1-2 速度制御(Velocity Control)
速度制御はモータやアクチュエータの速度を一定に保つ機能です。ベルトコンベヤーの速度を一定に保つ場合や、ロボットの動作をスムーズに行う場合に使用されます。
- 主な用途:産業用機器のベルコベア・工作機械の切断速度・ロボットの動作速度などの制御。
- 主な技術:センサーを使用して現在の速度を監視し、必要に応じて制御信号を調整して設定速度を維持します。
1-3 加速度制御(Acceleration Control)
加速度制御は動作開始や停止時に加速度を管理し動きがスムーズで衝撃を最小限に抑えるようにします。急激な動作やブレーキを避けることで機械や部品の寿命を延ばすことになります。
- 主な用途:産業用ロボットのアーム操作・CNC機械のツール移動・搬送システムなど。
- 主な技術:加速度の制御は事前に設定された加速・減速プロファイルに基づいて滑らかな動作を実現しています。
1-4 軌道制御(Trajectory Control)
軌道制御は機械やロボットが移動する際の経路(起動)を計画(プログラミング)を行いその内容通りに動作させる機能です。直線や円弧など複雑な動作経路を計画(プログラミング)してスムーズな移動を実現します。
- 主な用途:ロボットアームが製品を移動させるときやCNC機械が材料を加工する際のツールパス。
(*)ツールパス:CNC機械などで製品を加工する際にツールが通過する経路をコード化したもの。
- 主な技術:プログラムによって設定された起動を基に、複数のモータの同期運転を行い軌道通りに移動を行います。
多軸制御は複数のモータやアクチュエータを同時に制御し複数の動作軸を同期させる機能です。産業用ロボットや複雑な機械では複数の動作軸が連動して動く必要がありこの制御が重要となります。
- 主な用途:ロボットアームの複数の関節・CNC工作機械のX軸・Y軸・Z軸・(Θ軸)の同時制御。
- 主な技術:各軸の動きを正確に同期させ特定の動作を行うためにリアルタイムで制御を行います。
※C++またはPython言語記述により実現可能 の追加必要
1-5 多軸制御(Multi-Axis Control)
多軸制御は複数のモータやアクチュエータを同時に制御し複数の動作軸を同期させる機能です。産業用ロボットや複雑な機械では複数の動作軸が連動して動く必要がありこの制御が重要となります。
- 主な用途:ロボットアームの複数の関節・CNC工作機械のX軸・Y軸・Z軸・(Θ軸)の同時制御。
- 主な技術:各軸の動きを正確に同期させ特定の動作を行うためにリアルタイムで制御を行います。
1-6 フィードバック制御(Feedback Control)
フィードバック制御はセンサーやエンコーダなどからデータを基に現在の動作状況を確認し・誤差を修正し・正確な動作を維持する機能です。クローズドループシステムで良く使用されています。
- 主な用途:ロボットの位置や速度の補正CNC工作機械の正確な加工精度の維持。
- 主な技術:モーションコントローラはセンサーからのデータをリアルタイムで受け取りプログラムされた目標と比較して動作を制御します。誤差が発生した場合は自動的に修正を行います。
1-7 同期制御(Synchronization)
複数の機械やモータが同時に動作させる場合はそれらの動作を同期させる機能です。例えば複数のベルトコンベアやロボットアームが同期して作業を行う際にはこの機能が重要となります。
- 主な用途:組立ライン・搬送システム・ロボットの協調作業。
- 主な技術:複数のモータやアクチュエータが同期して動作するように、正確に時間(タイミング)と位置を制御します。