
ステッピングモータは通常基本角度またはその半分で使用します。
基本角度での使用(一般的には1.8度):フルステップ
基本角度の半分での使用(一般的には0.9度):ハーフステップ
これをさらに小さい角度を使用する場合をマイクロステップと言います。
下図はステッピンモータの説明では一般的に使用する図です、例えばA相とB相は数学的には90度ですが、基本角度の1.8度として見て下さい。
1.フルステップ(2相励磁)
※常に2相が励磁しています。
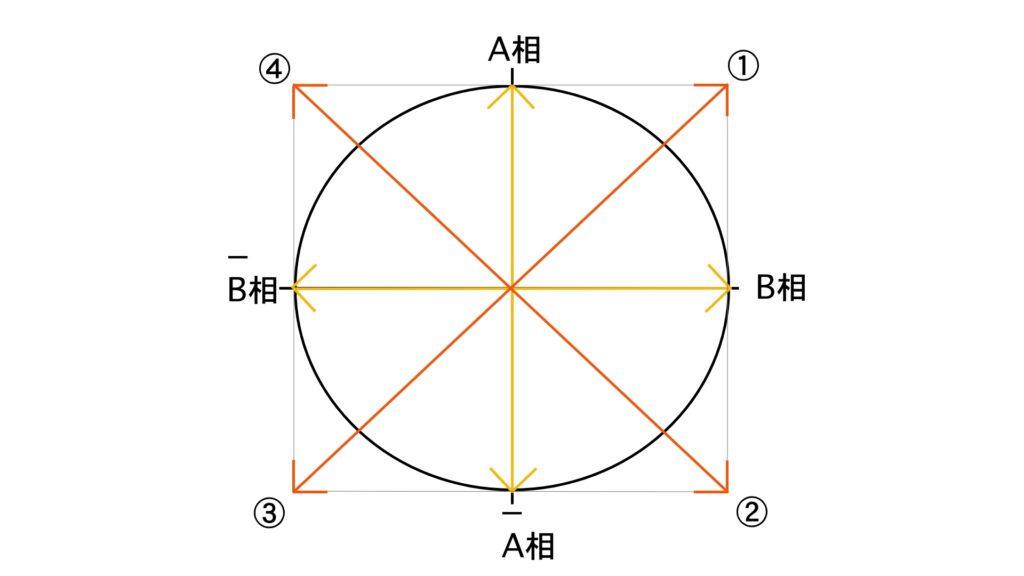
A相、B相が励磁している
B相、A相が励磁している
Ā相、B相が励磁している
B相、A相が励磁している
2.ハーフステップ(1-2相励磁)
※1相励磁と2相励磁を繰り返します。
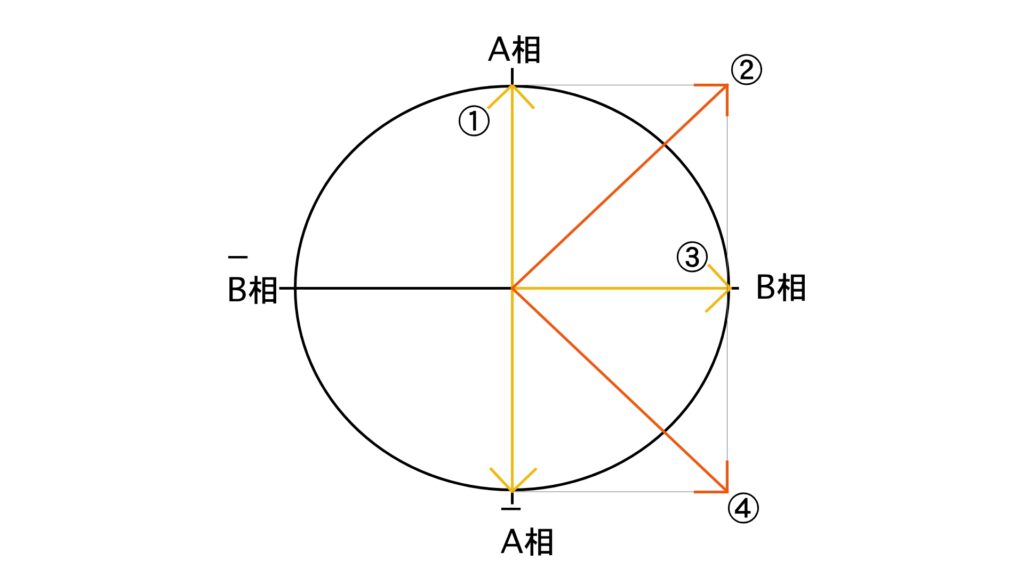
A相が励磁している
A相、B相が励磁している
B相が励磁している
B相、Aが励磁している
マイクロステップではこの②の時に少し細工をして実現しています。
3.マイクロステップ
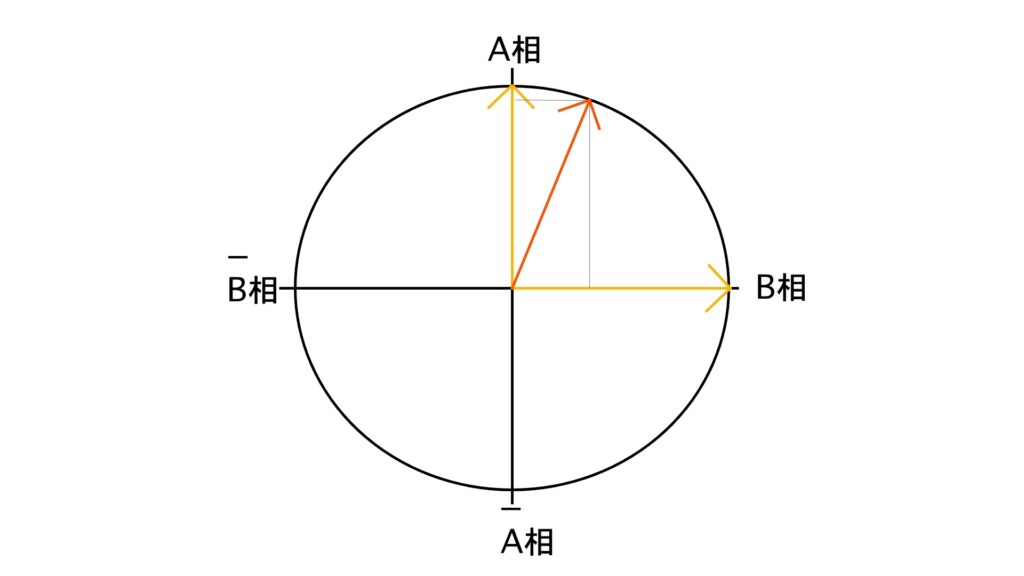
この様なイメージです。
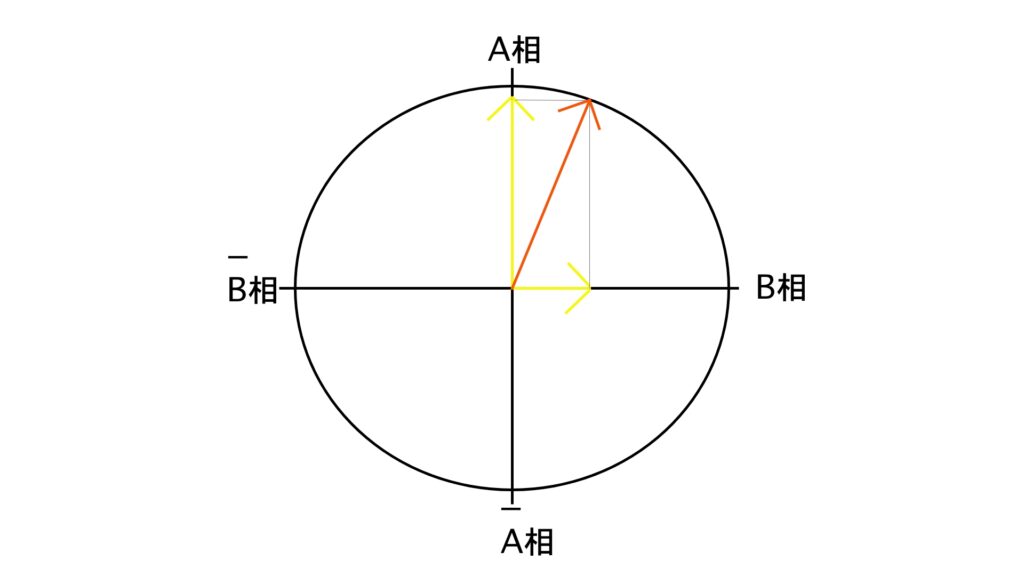
・A相に流す電流(黄色矢印)とB相(黄色矢印)に流す電流を制御して合成ベクトル(赤矢印)を制御してハーフステップより小さなステップ角度を実現しています。
A相100%:B相0%からA相電流を徐々にへらし、B相電流を徐々に増やし、A相0%:B相100%と「徐々に変化」を制御することでマイクロステップの分解能を決めています。1/5~1/100位が一般的です。
B相からAへ、AからBへ、BからA相へも同様に制御しモータの回転を実現しています。
今説明した事の逆の制御を行えば回転方向は逆方向に回転します。
東阪電子機器の技術情報
弊社ではマイクロステップ製品のODMやOEM/EMSにてご相談を承っております。 「お問い合わせ」より、お問い合わせください。東阪電子機器ではお客様が求める(開発期間・価格・品質)製品を設計・製造・販売いたします。