
1:エンコーダとは
位置センサーのひとつです。
回転・移動など機器や装置の位置がどのくらい移動(偏位)したか、あるいは回転(角度)したのかそのときの速度を検出(計測)する役目をはたすものです。
われわれでよく使用するのはモータと組み合わせして、モータの回転速度・回転した量(移動量・角度)・速度を知るのに使用します。
また、形状によって分類され、ロータリエンコーダとリニアエンコーダがあります。
ロータリエンコーダは円板の形状で偏位を検出します。 リニアエンコーダは直線(リニア)の形状で偏位を検出します。
基本的にな構造はどちらもほぼ同じですが、ロータリエンコーダが多く使用されています。
2:エンコーダの仕組み・原理
エンコーダは大きく分けると
・光学式エンコーダ
・磁気式エンコーダ
・機械式
があります。
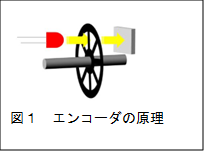
図1は光学式エンコーダを簡単に表した図です。
モータ軸に取り付けられた円板にスリットを開け光の透過・遮光で受光センサーがON-OFFを検知します。
速度のみを知りたいときは図1の様に一つの同一円心上のスリットでよいですが、モータに使用するのですから回転方向も検出したい場合は、通常同一円心上に2つのスリットを用います。
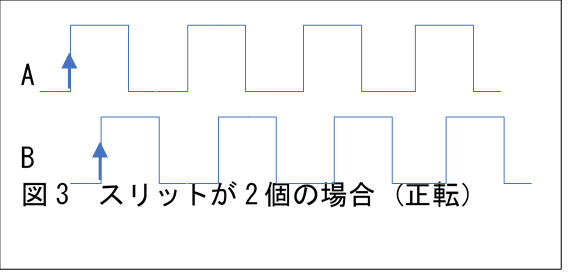
スリットが2つの時のセンサーの波形は図3と図4です。
AとBの2つが位相90°の状態になる様に作られています。
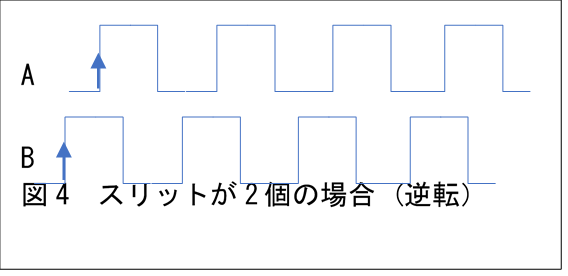
エンコーダ(モータ軸)が正転(時計方向)の時は図3の様にAの立ち上がり(上向き矢印)の後にBの立ち上がり(上向き矢印)のロジック波形となります。 逆転(反時計方向)のとき図4の様に逆でBの立ち上がり(上向き矢印)の後にAの立ち上がり(上向き矢印)のロジック波形です。
モータの速度はA又はBの周期を計測しています。(一定時間当たりのパルス数をカウント)これらの情報を制御回路で取り込み方向・移動量(パルス量をカウント)・速度を判断して装置の制御を行います。
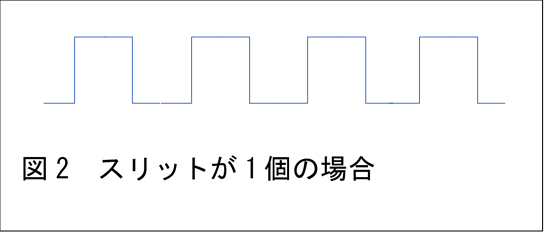
図2の様にスリットが1個だと図3・図4の様に回転方向の検出が出来ません、回転方向は不要で周期(速度)のみ計測できれば良い場合はこの方式を使用します。スリットが一つの場合構造的にも制御回路的にもコスト面で安価に出来るメリットがあります。
ここでは図は有りませんが、実際の多くのエンコーダには1回転に1パルスだけ出力する原点信号があります、一般的に「C」又は「Z」と呼ばれています。
通常は「A」「B」「C」を使って位置・回転方向・速度・原点(基本位置)の制御を行いモーションコントロール制御を行っています。
3:エンコーダの種類
エンコーダは大きく分けると
・光学式エンコーダ
・磁気式エンコーダ
・機械式
に分けられます。
・光学式エンコーダ
光学式エンコーダは主に光源・スリット・受光センサーで構成されます。 スリットには光源からの光を遮断する役目のいわゆるスリットを刻んでいます。(図1)このスリットが細かい程精度が高くなります。 発光素子からの光のをスリットで遮光・透過する事により受光センサーがON・OFFすることで電気信号として出力します。 光の透過・遮光を受光センサーで読み取るので磁気等の影響を受けづらいですが通常透過・遮光を行うスリットはガラスベースで作られるので衝撃に弱い短所があります。
・磁気式エンコーダ
磁気式エンコーダは磁石の「S」 「N」 を順番に並べて磁気の変化を磁気センサー(ホール素子)で読みとる方式です。 当然磁気に弱い弱点がありますが、振動については光学式エンコーダに比べて強い長所があります。
・機械式エンコーダ
機械式エンコーダはポテンショメータとも呼ばれ、簡単にいうとボリューム の様なものです。
回転角度に応じて抵抗値が変化するのでその抵抗値の変化を検出します。 多回転には向きませんが、抵抗の増加・減少で回転方向は検出出来ます。検出回路も簡単で安価に構成出来ます。 いま流行りのドローン等ラジコンのプロポ(コントローラ)に使われています。 レバーを右に倒すと右方向に旋回(倒す量によって大きく旋回したりなど)する等のコントロールに使われています。 最近では自動車のアクセルの踏み込み量などはこの方式を採用している車種もあるようです。アクセルの踏みこみ量をポテンショが検出して車載コンピュータに情報を伝達しエンジン回転数を制御しています。
4:エンコーダの選び方
一般的には
高精度・高分解能が必要な用途では光学式エンコーダを使用します。
耐環境性・小型・高信頼性が必要な用途では磁気式エンコーダを使用します。
安価・容易な方法の用途では機械式エンコーダを使用します。
如何でしたでしょうか弊社ではこの様な各種エンコーダの特性を十分に理解し仕様に有った部品選定を行い各種制御装置の試作から量産までの設計・開発・製造・販売の実績が多々あります。