
1.サーボモータとは
我々の周りには色々なモータがあります、プラモデルに使用する様なおもちゃの様な小さなモータから水力発電所で使用される大型なものまで多種多様なものがあります。この様にみなさんが知っている汎用性のあるモータから工場の生産ライン(自動化ライン)の様な製造ラインに使用されるモータの中にサーボモータとよばれるモータが有ります。
そもそもサーボモータとはサーボ制御*1を用いて速度、位置を制御する目的に使うモータを言います。産業用機器やロボットを用いて自動化のラインを構築しようとした場合、部品などを決められた位置に精度良く置く、移動させる、ネジやビスなどを締結する動作を行わせるのにサーボモータを使用します。
この時、サーボモータはコンマ何ミリや時にはそれ以上の位置決め精度を要求されます。 物や部品を移動させる際には時にはその際の速度精度(速度変動が少ない)も要求されます。
これらの要求にもサーボモータは対応が可能です。
*1:モータに対して動かそうとする指令とモータが実際に動いた移動を検出し常に両者を比較しその差をゼロにしようとする制御
2.ステッピングとサーボモータの違い
ステッピングとサーボモータの違いは比較しますと
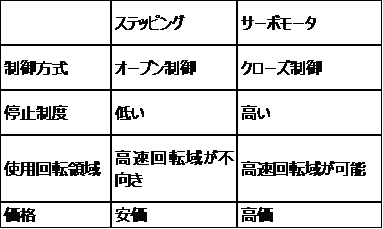
・制御方式
ステッピンモータは構造的に基本角度で動作する構造になっているので、モータを励磁(電流を流す)すると基本角度で動作しますので、順番に励磁するタイミングを切り替えるとモータは回転します。 サーボモータはエンコーダからフィードバックと指令(パルス)を比較しお互いの差が0になるように動作するので、エンコーダからのフィードバックと指令(パルス)とを比較する制御を行います。
・停止精度
これは制御に大きく影響しますが、サーボモータは停止中もエンコーダによるフィードバックを行っているのでその位置を保持しようと監視していますので位置がずれた場合異常を検出することが可能ですが、ステッピンではずれた事を監視していないので異常として検出することが出来ません。
・使用回転領域
サーボモータは低域から高速域までほぼ安定してトルクを出すことができますが、ステッピングモータは低域でのトルクを出すことは出来ますが、高速域になるとトルクは減少し高速で回転させようとすると脱調という特有の現象を発生し回転出来なくなります。
・価格
サーボモータはステッピンモータに比べエンコーダ等センサー類がコストアップとなります。 当然ですが、モータを駆動するドライバーも同様にサーモモータドライバーはステッピングモータドライバーに比べコストアップになります。 比較的コストを抑える場合はステッピンモータを用いて、高速高精度を要求する場合はサーボモータが適していますが、高精度を要求する場合駆動系(メカ)も要求に見合った剛性が求められます。駆動系の剛性が十分でないとサーボモータの本来の性能を発揮することが来ませんので注意が必要です。
3.サーボモータの特徴
サーボモータの特徴はサーボ機構です。 サーボ制御については先程(1項)で述べましたが、サーボの語源について説明しましょう。
サーボとはラテン語のServus(サーパス:奴隷)からきている様です、奴隷は言いつけ通りに働く(指令に対して忠実に動作する)の意味から機械装置を指令通りに正確に動作が出来る制御をサーボ機構(サーボ制御)と言われるようになった模様です。
サーボモータはエンコータにより速度や位置を監視しているので、ステッピングモータの様に高速で回転させても脱調することは無く、また大きな力が加わってもサーボモータの制御許容範囲内であれば速度や位置の修正動作を行う制御をしていますので動作中に負荷変動などがあっても、速度を一定に保って目標の位置へ移動することが出来ます。
4.サーボの弱点
サーボモータのよい面を色々と述べましたが、良い面が多い分制御も複雑になり部品点数が増加し構造も複雑になります、その分工数が増えコストが高くなります。また色々な制御が出来る分その設定も複雑になり時には使用時の設定が煩雑になり使いづらくなることも有ります。ステッピンモータの様な特有の脱調の発生は有りませんが偏差を常に0になる様に追従する制御を行うので「偏差=遅れ」の発生が有ります。
また、アブソリュート方式のエンコーダを使用した場合位置情報を記憶出来るという大きなメリットがありますが、内蔵バッテリーで位置情報を記憶させているので定期的なメンテナンス(交換)の必要が発生します。
5.サーボモータの当社の取り組み
弊社は標準品ではサーボモータ駆動装置の製品は有りませんが、OEM・ODMでの使用実績はありますので試作品からの開発を行うことが可能です。気軽にお声がけ頂ければ貴社の制御製品の試作・開発のお助けになることが出来ます。