1.ユニポーラ駆動とバイポーラ駆動の違い
主にステッピングモータ等の駆動回路に用いられているモータ制御の方式で
- バイポーラ駆動:1つの巻線に対して双方向に電流を流す駆動方式
- ユニポーラ駆動:センタータップを持ち、1つの巻線に対し常に一定方向に電流を流す駆動方式
1-1 ユニポーラ駆動
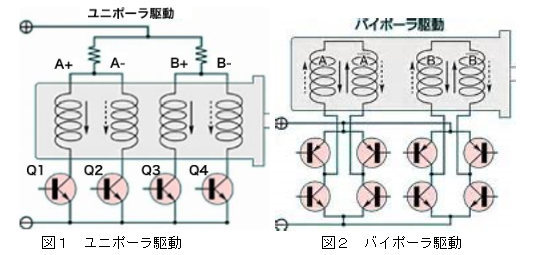
ユニポーラ駆動では、各モータ相は2系統のコイル巻線で構成します。A相とB相で構成される2相モータの場合、モータには4系統のコイル巻線を設置します (図1を参照下さい)。
A相はA+、A-で構成
B相はB+、B-で構成
各コイルについて、電流は一方向のみに流れます。それゆえユニポーラと呼びます。
電圧ドライブの場合、コイルごとに1個のトランジスタ(スイッチ)があるだけで、モータ制御システムとしては非常に簡単な回路になります。トランジスタを閉じる(ONする)と、コイルに電力が供給されます。電流を流すコイルを切り替えるために、トランジスタを交互に開閉(OFF・ON)することでモータ制御を行います。
トランジスタQ1とQ2は同時にONすることはありません。A相に電力を供給するには、トランジスタQ1またはQ2のいずれかをONさせます。
B相についても同様で、Q3とQ4は同時にONする事はありませんので何れかのトランジスタをONさせます。
ユニポーラ制御では、電力を供給するのは一度に相の半分だけです。つまり電流はコイルの量の半分だけを使用します。通常電圧ドライブでは直列抵抗を使用する事で電気的時定数を減らします。
1-2 バイポーラ駆動
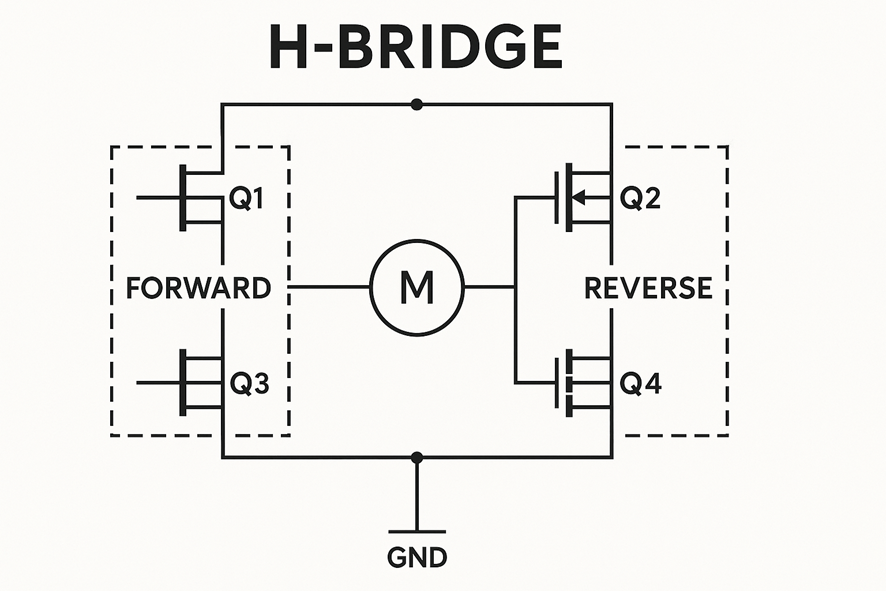
バイポーラモータでは、相ごとに必要なコイル巻線はひとつだけです。電流はどのコイルにも両方向に流れるため、バイポーラと呼んでいます。制御には8個のトランジスタを使用した2基のHブリッジが必要となります。(図2の様に2組の回路を使用します。)
電流の方向を切り替えるには、以下に示すようにトランジスタを交互にON・OFFする事でモータ制御を行います。
①図3(Hブリッジの1基の状態です)でQ1、Q4をON:Q2、Q3をOFFの状態にすると。
電源=>Q1=>モータ(+)=>モータ(-)=>Q4=>GNDの経路で電流がながれます。
②次に(図4)Q2、Q3をON:Q1、Q4をOFFの状態にすると。
電源=>Q2=>モータ(-)=>モータ(+)=>Q3=>GNDの経路で電流がながれますのでモータには先ほどの①の時と逆の方向の電流が流れます。
(図3は 図2の片側(A:左側)をわかりやすく一つのコイルとして説明しています)
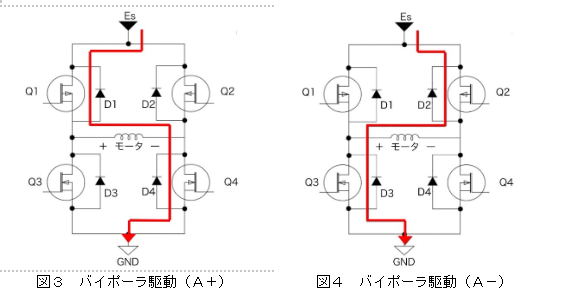
この様にしてモータに流す電流の方向を切り替えています。(B相も同様に行います)
バイポーラドライブの利点は、各相でコイル全体を使用することです。
このようなバイポーラドライブは、電圧ドライブま たは電流ドライブのいずれかで使用します。電流ドライブの場合、通常は各相に流れる電流をパルス幅変調(PWM)にてモータ制御を行っています。
1-3 バイポーラ駆動とユニポーラ駆動のまとめ
①ユニポーラ駆動
- センタータップがある構造になります。1つの巻線に対し常に一定方向に電流を流す駆動方式(ユニポーラ駆動)となります。
- モータの構造は複雑になりますが駆動回路は簡単になります。
- 巻線の利用効率が悪くなります。バイポーラ結線に比べ約半分の出力トルクしか得られないです。
②バイポーラ駆動
- 1つの巻線に対して双方向に電流を流す駆動方式(バイポーラ駆動)となります。
- 構造は簡単だが駆動回路は複雑になります。
- 巻線の利用効率がよく細やかな制御ができるので高い出力トルクが得られます。
(※)電圧ドライブ:
最近ではあまり使用されていない方法(方式)です。
回路構成(モータドライブ部分)が簡単なため、ユニポーラ駆動で採用されることが 多かった様です。モータコイルに電圧印加する方式ですが、モータのインダクタンスの影響により、モータコイルに流れる電流が上昇するのに時間を要します。
電気時定数tは式1で求められます。
t=Ⅼ/R ・・・・ 式1
この時モータコイルに直列抵抗を追加して【電気時定数t】を小さくすることが出来ます。
しかし直列抵抗Rによってモータに流れる電流は現象します。(図1のコイルの上に付いている抵抗です)
- 低速では、トルクが低くなります。トルクは電流に比例しますが、外部抵抗でのジュール損失により電力が消費され電流値が下がり、モータのトルクは減少します。
- 高速では、トルクが高くなります。外部抵抗でのジュール損失によりいくらか電力が消費されますが、電気的時定数が低くなるため、コイル内の電流がより速く上昇し、モータはより多くのトルクを供給できます。
よって供給する電圧を上げると、より低い電流でもこの効果を(低速時のモータトルクが高くなる)発揮させることができますが、全体的なエネルギー効率は低下します。
(以上の様に抵抗によってコイルに流れる電流の制御を行っていたので、この方式を 抵抗方式とも呼んだそうです。)
(※)電流ドライブ:
通常は各相の電流をパルス幅変調(PWM)で制御します。バイポーラ駆動の場合は主に 下側のトランジスタ(図3ではQ3・Q4になります)を制御します。
実際にはモータに流れる電流をモニターしモータに流れる電流を一定の値に制御する(定電流駆動)方式で近年では一般的な駆動方式となっています。
先ほどの「電圧ドライブ」と比べてエネルギー効率は格段に向上し優れたモータ制御となっています。
ユニポーラ駆動でもこの方式は用いられます。その際は図1のユニポーラ駆動の説明にある抵抗は不要です。
2.駆動方式によるモータの違い
2-1 巻き線数の違い
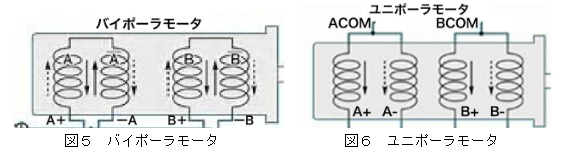
バイポーラモータ:図5の様にモータ巻き線は4本です。
ユニポーラモータ:図6の様にモータ巻き線は6本(モータによっては8本)です。
2-2 配線数の違い
バイポーラモータとユニポーラモータではモータ配線数がバイポーラモータの方が少ないので省配線になります。一方ユニポーラではモータ配線が6本となります。
(モータによってはACOM・BCOMが接続されておらず8本線になっているモータも存在します。・・・しかし、このような場合はモータ側でACOM BCOMになる様に接続すれば6本の配線で済みます。8本の配線をすることは不要です。)
2-3 トルク特性の違い1
ユニポーラモータでは【コイルA+とコイルA-】【コイルB+とコイルB-】がモータ制御上で同時にONする事は有りませんが、バイポーラモータの各巻き線【コイル A】【コイルB】には常にコイル全体に電流が流れますので、発生するモータのトルクはバイポーラモータの方がユニポーラモータより強くなります。
2-4 トルク特性の違い2
バイポーラモータの方がユニポーラモータより発生するトルクが強いといいましたが、これはバイポーラモータのインダクタンスが大きくなるからですので、モータが停止時又はモータ回転数が低速時おいては当てはまります。
しかしモータ回転数が高速域では大きくなったモータのインダクタンスの影響で電流が流れにくくなりトルクが低下します。
使用するアプリケーションによってはバイポーラ・ユニポーラの方式の特性を理解の上選定が必要となります。
(※)モータが停止時のトルクのことを【ホールディングトルク】と言います。
停止時にトルクが必要な垂直荷重での使用時以外では通常はモータに流す電流を減少させています。